Ray Coden Mercurius
Email: ray.mercurius@mail.utoronto.ca
Github: Ceudan
Google Scholar: Profile
Theme by orderedlist
Learning Reinforcement Learning via Car Racing
2022.6 Full Document
I hand coded multiple reinforcement learning algorithms for the openai Car Racing environment. Namely I applied Double Deep Q networks and Proximal Policy Optimization. The purpose of this project was to become familiar with RL libraries, algorithms and hyperparameter tuning. While exploring, I gave myself a research question. That is, can I officially beat the environment at a lower computational cost than others?
My PPO project was very succesful, obtaining the highest test score and beating the environment at the 2nd lowest training cost on OpenAI’s official Car Racing leaderboard. (917/900 score averaged over 100 test episodes, after 925 training episodes). Unlike others that simply threw compute at the problem, I used a method fitted for the environment. Mainly, I simplified the learnable relationship by seperating the steering and thrust actions to 2 independantly trained agents. Additionally, I reduced the computer vision burden on the actor/critic networks by moving speed estimation to a seperate deterministic process. These simplifications reduced training cost and convergence complications, allowing me to run many more design iterations than others.
Sliding Puzzle Solver
There are 2 distinct stages to this puzzle. First, you must estimate the original configuration of the subpieces. Second, you must find a way to rearrange the subpieces into the original configuration while obeying the constraints of the game.
Subtask 1: Original Configuration Estimation
2022.3 Full Document
Worked in a team of 3 leveraging Deep CNN’s and advanced combinatoric algorithms for the task. This subtask is identical to that of solving square jigsaws. Pipeline consisted of pre-processing raw scenic images into the puzzle structure, fine-tuning pretrained Deep CNN’s to predict the likelihood of sub-peices being conjoined, then utilising a deterministic solving algorithm to estimate most the likely configuration.
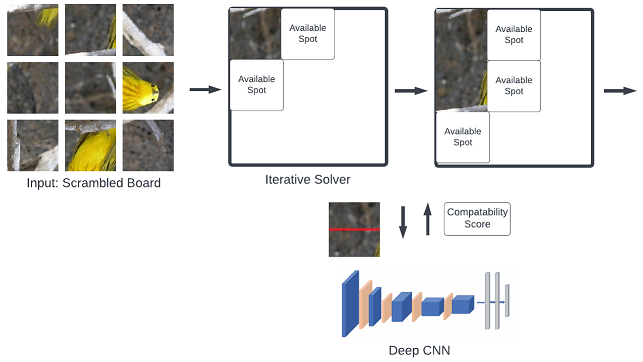
All Deep CNN’s achieved an adjacency prediction accuracy of over 90%. Importantly, by testing various pre-trained architectures such as RESNet, RESNext and VGG we were able to deduce useful insights regarding the application of CNN’s to the problem. Namely, shorter wider CNN’s outperform deeper ones. This was due to the models facing significant error when comparing images lacking in large features (ex. subpieces of the sky), where localized pixel level details become critical. We hypothesiszed this may prove difficult for Deep CNN’s where location and low level information is lost in its deeper layers, especially when tuning models pretrained for object recognition.
Subtask 2: Tile Rearrangement
One day I hope to have enough time to return and complete this section comparing various reinforcement learning techniques.
Predicting Student Question Performance
2021.11 Full Document
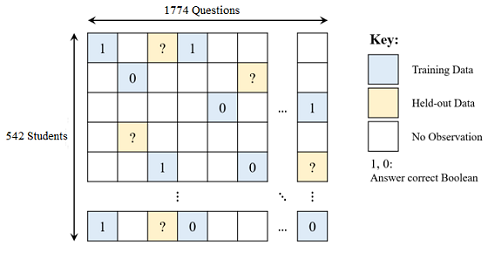
Led a team of 3 to write an ensemble machine learning model with bagging to predict a student’s performance on diagnostic questions. Our ensemble combined 3 distinct algorithms. Motivation was a course project.
Given Data
Model Architecture
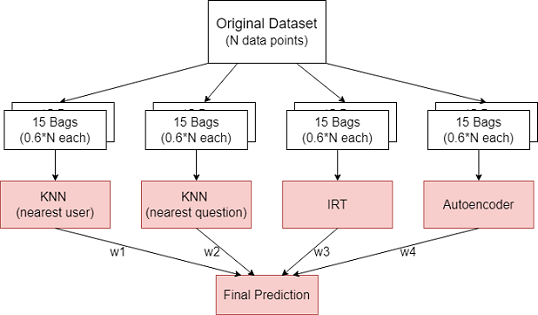
Achieved mark of 97%. We ranked 18th in a coursewide competition (over 300 eligible competitors) with an accuracy of 70.3%. After fixing bugs and updating model to current version, accuracy increased to 71.3%, which would have ranked us 5th place.
Matching Road Sections between Databases
2021.8 Full Document
I independently created software to match sections across databases using geospatial information. This was one of the many tasks I recieved at the University of Toronto Transportation Research Institute. Hurdles included:
- over 100,000 road sections per database (strong time complexity requirements)
- close proximity does not gaurentee correct match
- geographic coordinates carry up to 10 metres of uncertainty

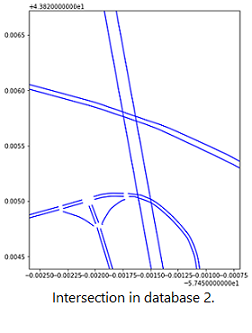
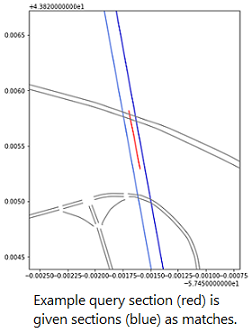
Achieved an accuracy of 94% on normal road types. Accuracy is dynamic since adjustable thresholds can tradeoff quantity with quality. It was succesfully used to match sections from an Aimsun traffic simulation covering the GTHA, with HERE Technologies’ observed traffic information.